EthoLoop 3D Tracking
The core elements to build EthoLoop Tracking system are:
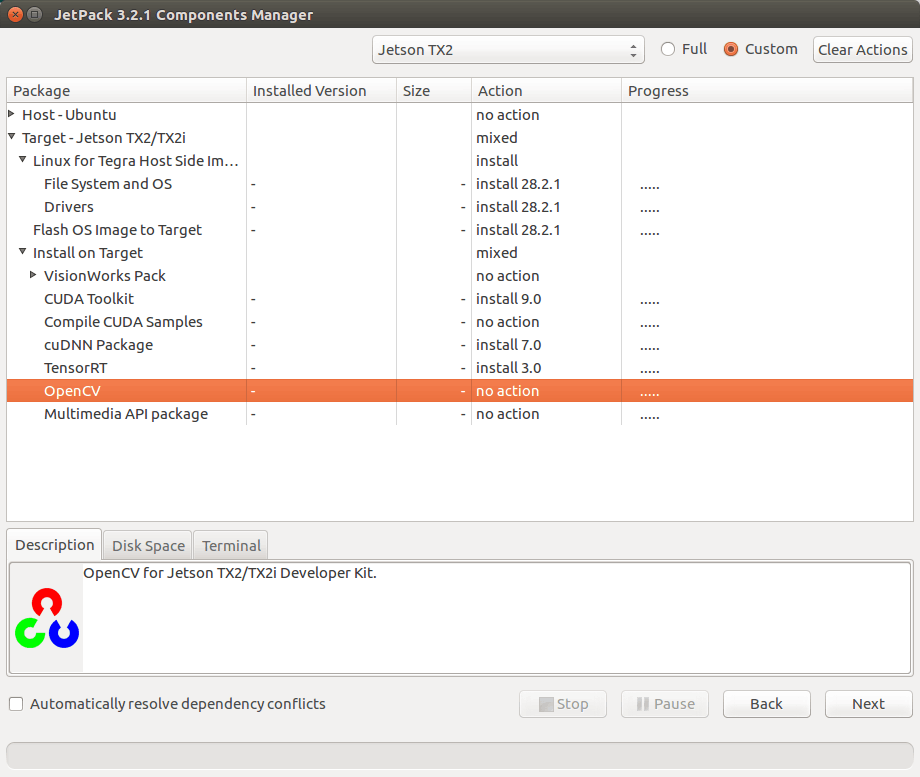
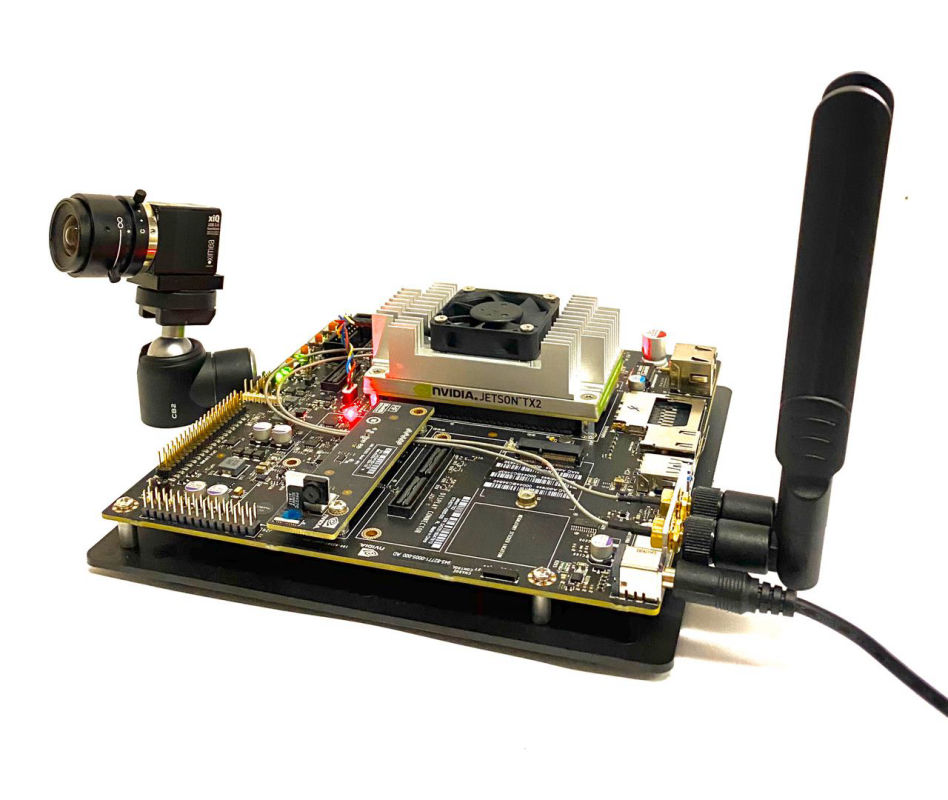
1- NVIDIA Jetson TX2
2- XIMEA Camera
3- Wide angle objectives
4- Wireless Router
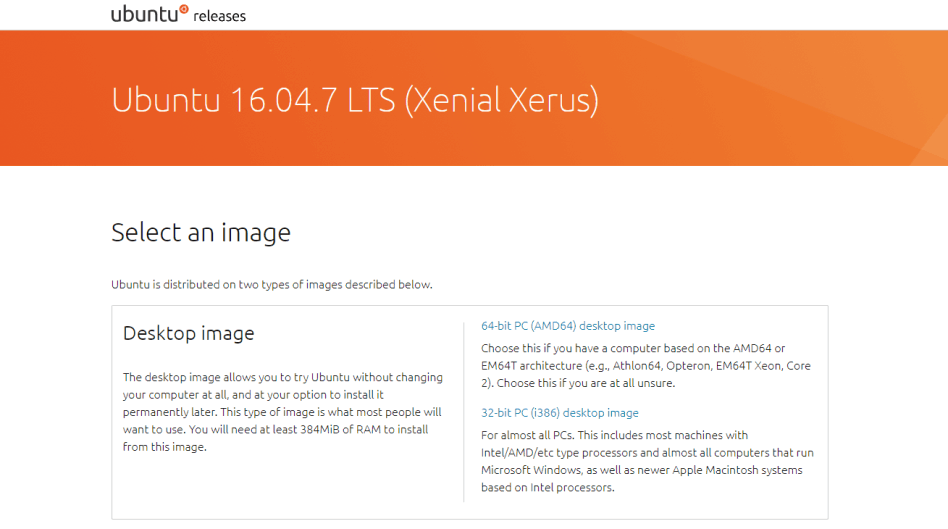
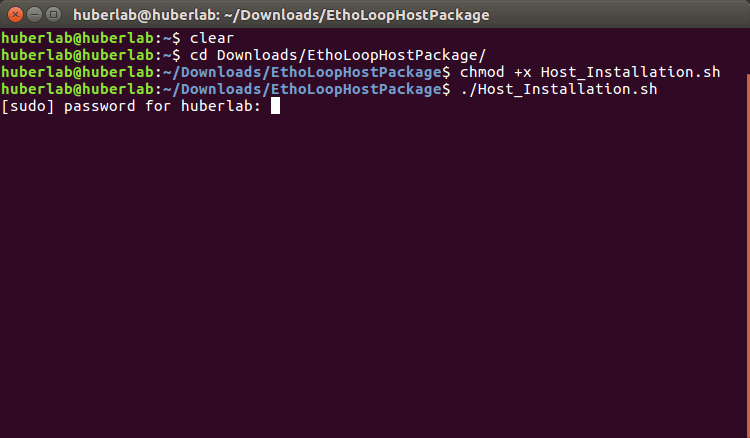
5- Linux Machine
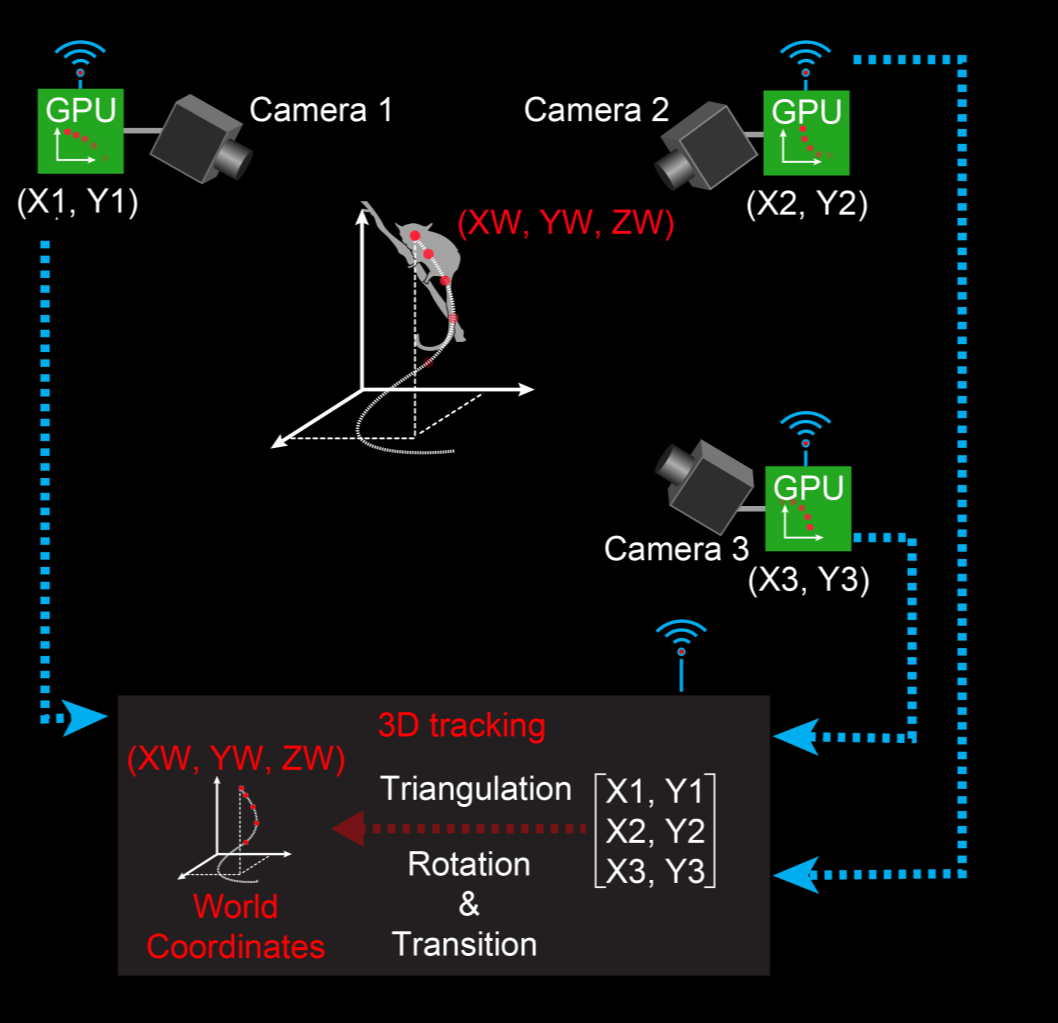
To track animals in three dimensional (3D) environments, Etholoop uses multiple high speed cameras (XIMEA) each connected to a single embedded AI computing device (NVIDIA Jetson) for image processing purposes. This allows tracking individuals at extremely high speed (~800 Hz). The Jetson TX2 modules are responsible to extract the two-dimensional information of individuals from each view point and wirelessly transmit them to the Host machine (Linux) for 3D reconstruction.